CC2640R2&BLE5.0开发
关于我们
入门开始
- 入门
- CC2640R2F 开发平台
-
视频教程
外设驱动
开发BLE应用
- 协议栈
- 无线固件下载(OAD)
- 应用举例
工具集
其他
- 仿真调试
- 移植向导
- Android BLE开发
CC2640R2&BLE5.0开发
关于我们
入门开始
视频教程
外设驱动
开发BLE应用
工具集
其他
BLE5-Stack 支持以每秒符号速率为 1 兆( Ms/s )。由于一个符号对应于一个数据位,因此与堆栈的高位相关联,比特率为 1Mb/s,这被称为 LE 1M PHY。LE 2M PHY 允许物理层以 2 Ms/s 的速率运行,从而实现比 LE 1M PHY 更高的数据传输速率。除了先前支持的 LE 1M PHY 之外,还将此 LE 2M PHY 功能引入蓝牙核心规范版本 5.0。
默认情况下,BLE5-Stack 的所有项目都支持 LE 2M PHY, 需要在应用程序中调用 API 来使用该功能。
添加了以下 HCI 命令来支持此功能:
当调用 HCI_LE_SetPhyCmd()时,Controller 启动 PHY 更新过程来更改 PHY。该过程会交换两个设备的 PHY 参数并根据 PHY 参数协商使用正确的 PHY 。根据对端设备的能力和优先级,PHY 更新过程可能不会导致有效 PHY 配置发生变化。
LE 2M PHY 功能使用与 LE 1M PHY 相同的发射功率,唯一的变化是 PHY 中数据的调制。由于在相同的输出功率下进行更高的数据调制,LE 2M PHY 的能耗会降低。下表列出了两个 PHY 之间的一些区别:
| 参数 | 比较 |
|---|---|
| 能量消耗 | 在对等设备中的两个端点之间的逻辑连接,其特征在于它们的信道标识符( CID ) |
| 速率 | 服务数据单元:L2CAP 与上层交换的数据包,并使用本文档中规定的过程通过 L2CAP 通道透明传输 |
| 接收灵敏度 | 协议数据单元:包含 L2CAP 协议信息字段,控制信息和/或上层信息数据的数据包 |
| 输出功率 | L2CAP 层实体可以接受的八位字节中的有效负载数据的最大大小(即 MPS 对应于最大 PDU 有效载荷大小)。 |
使用 LE 2M PHY 的主要优点是高吞吐量应用程序以更高的速度传输数据。
以下是 BLE5-Stack 当前的 PHY 限制:
应用程序可以调用 HCI_LE_SetDefaultPhyCmd()设置主配置和从配置默认的 PHY 首选项。如果没有指定首选项或 API 没有被调用,则堆栈将使用所有支持的 PHY(1M + 2M)。类似地,对于 HCI_LE_SetPhyCmd(),如果没有指定首选项,则堆栈将使用默认 PHY(即由 HCI_LE_SetDefaultPhyCmd()定义的连接 PHY )),否则将使用参数中指定的内容。
HCI_LE_SetDefaultPhyCmd()应在连接之前调用,HCI_LE_SetPhyCmd()只能在连接期间被调用。另请注意 HCI_LE_SetDefaultPhyCmd()不更改 PHY,只有 HCI_LE_SetPhyCmd()可以更改 PHY。
在下面这两种情况下使用 HCI_LE_SetDefaultPhyCmd()设置的首选项:
在 PHY 协商中可以看到这个例子。
应用程序可以在连接中启动 PHY 更新过程,不需要考虑设备的角色。在 PHY 协商期间默认使用 HCI_LE_SetDefaultPhyCmd()设置的 PHY 首选项,除非 HCI_LE_SetPhyCmd()更改了 PHY 。HCI LE setdefaultmd()用于指定用于传输和接收所有后续连接的首选参数。但是当 HCI_LE_SetPhyCmd()用于更改连接的 PHY 时,更改仅适用于该连接(后续连接将恢复为使用默认 PHY )。
两者的参数 HCI_LE_SetDefaultPhyCmd()和 HCI_LE_SetPhyCmd()是相同的。ALL_PHYS 参数指定是否使用其他两个参数( TX_PHYS 和 RX_PHYS )。主值 '1' 表示客户端没有该方向的 PHY 偏好,而 '0' 表示应该使用相应的参数。可以将 TX_PHYS 和 RX_PHYS 设置为指定用于发送和接收的 PHY。请注意,当指定所有支持 PHY,堆栈总是试图一组 PHY 协商期间选择最快的 PHY 。
下面的序列图 1 显示了主机启动 PHY 更新过程的用例。
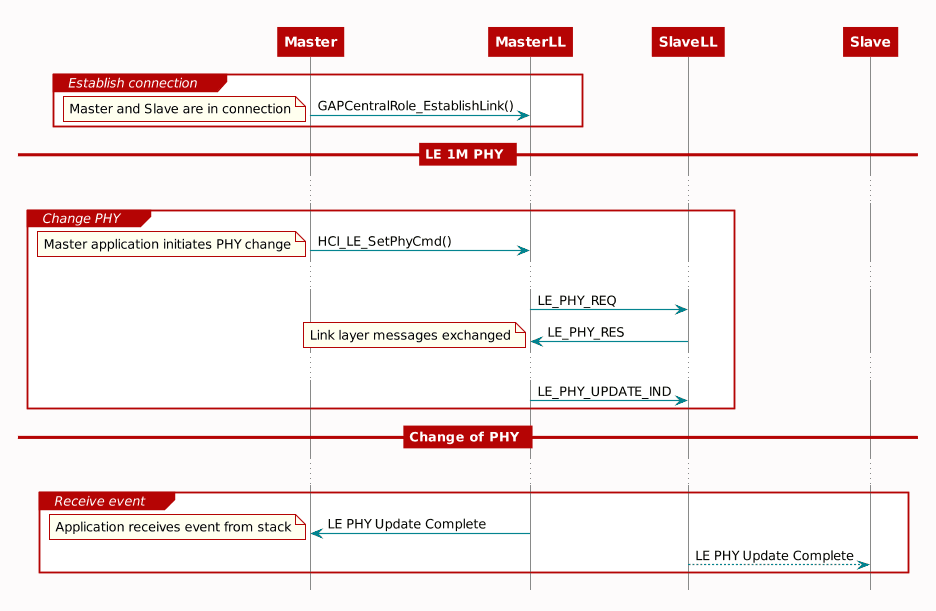
图1. 主机启动 PHY 更新过程
或者图 2 中从设备也可以使用与以下相同的 API 启动 PHY 更新过程。
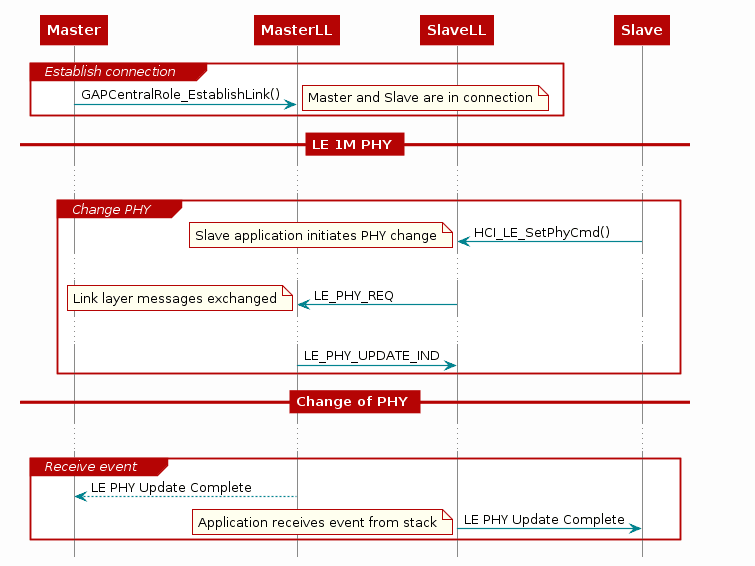
图2. 从设备启动 PHY 更新过程
如果 PHY 没有改变(例如,如果主机尝试更改为 Slave 不支持的 PHY ),那么只有启动 PHY Update 过程的一方将获得 hciEvt_BLEPhyUpdateComplete_t事件,另一方将不会收到 hciEvt_BLEPhyUpdateComplete_t 事件,如图 1 和图 2 中虚线箭头所示。
文章所有代码、工具、文档开源。加入我们QQ群 591679055获取更多支持,共同研究CC2640R2F&BLE5.0。
 © Copyright 2017, 成都乐控畅联科技有限公司.
© Copyright 2017, 成都乐控畅联科技有限公司.
